Des jambes humanoïdes imprimables en 3D pour libérer l'expérimentation en robotique
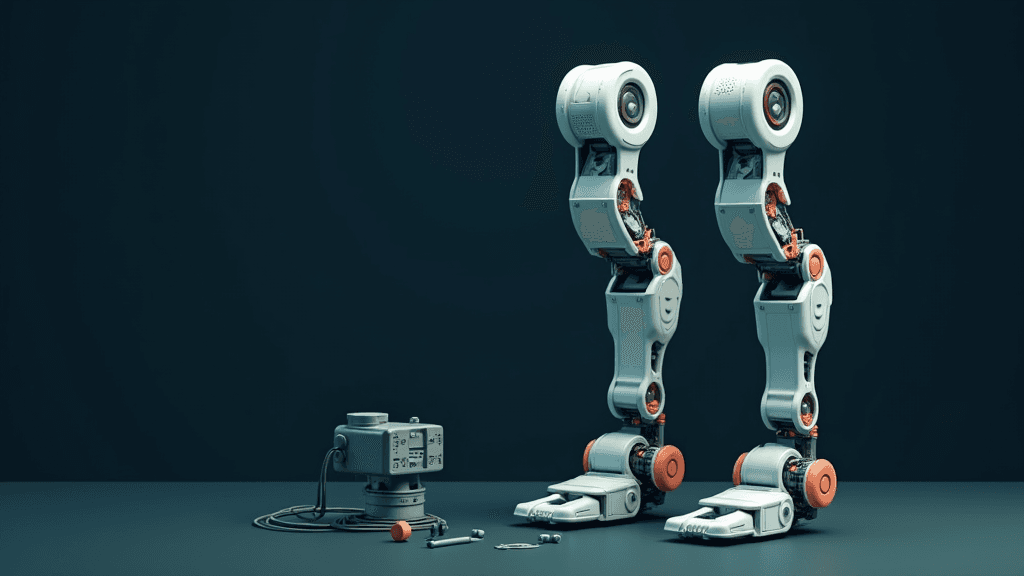
Hugging Face a publié le projet LeRobot Humanoid, une paire de jambes robotiques humanoïdes conçue pour être accessible aux chercheurs et aux développeurs. L'ensemble coûte environ 2 500 dollars et repose sur des pièces imprimées en 3D ainsi que des composants disponibles dans le commerce. La publication est complète : elle comprend une liste de matériaux, les fichiers nécessaires à l'impression des pièces, la documentation de câblage, les instructions d'assemblage physique, ainsi que des outils logiciels pour calibrer et contrôler le robot, que ce soit dans un corps physique ou en simulation. Le projet a été présenté dans un billet de blog cosigné par Virgile Batto, ingénieur en robotique chez Hugging Face.
Cette initiative pourrait significativement abaisser la barrière d'entrée dans la recherche en robotique humanoïde. Jusqu'ici, développer un robot physique capable de servir de plateforme d'expérimentation représentait un investissement prohibitif, souvent réservé aux grands laboratoires académiques ou aux entreprises bien financées. Disposer d'un corps physique à moins de 3 000 dollars permet aux équipes de taille modeste de tester et d'entraîner des logiciels d'IA robotique en conditions réelles, là où la simulation seule montre ses limites. L'accès au code source, aux schémas et aux fichiers de fabrication facilite aussi la modification, la réparation et l'instrumentation du robot selon les besoins spécifiques de chaque expérience.
Hugging Face s'est imposé comme une infrastructure centrale de l'écosystème IA open source, notamment autour des modèles de langage et de vision. Son incursion dans la robotique physique s'inscrit dans une dynamique plus large où plusieurs acteurs tentent de démocratiser le développement de robots intelligents, face à des projets commerciaux comme ceux de Figure AI, 1X Technologies ou Boston Dynamics, qui restent hors de portée pour la plupart des chercheurs indépendants. LeRobot Humanoid ne prétend pas concurrencer ces plateformes avancées, mais vise explicitement un public qui veut comprendre, modifier et apprendre, ouvrant potentiellement la voie à une communauté de robotique ouverte comparable à ce qu'a été Hugging Face pour les modèles de langage.
Hugging Face, entreprise aux origines françaises cofondée à Paris, démocratise la recherche en robotique humanoïde avec un kit open source à 2 500 $, ouvrant la voie aux laboratoires académiques européens aux budgets limités.
2 500 dollars pour rentrer dans la recherche en robotique humanoïde, c'est une vraie rupture. Hugging Face fait exactement ce qu'ils ont fait pour les LLMs : mettre les fichiers, la doc et les outils sur la table et laisser la communauté faire le reste. Une paire de jambes imprimées chez soi c'est encore loin de Figure AI, mais c'est pas le but.
Dans nos dossiers
Vu une erreur factuelle dans cet article ? Signalez-la. Toutes les corrections valides sont publiées sur /corrections.