
CubeDAgger : apprentissage par imitation interactif pour systèmes dynamiques, avec une interaction efficace et à faible risque
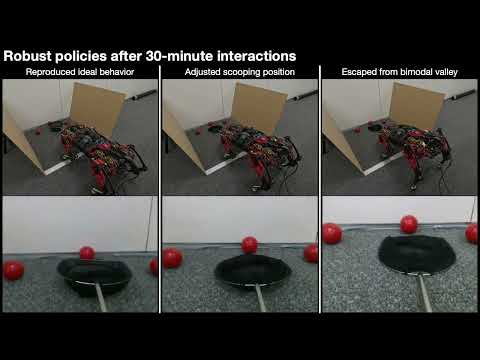
Des chercheurs ont publié CubeDAgger, une nouvelle méthode d'apprentissage par imitation interactive conçue pour les systèmes robotiques dynamiques. Présentée dans un article soumis à arXiv (identifiant 2505.04897), elle s'appuie sur un cadre existant appelé EnsembleDAgger et y apporte trois améliorations distinctes : une régularisation explicite du seuil de déclenchement des corrections humaines, un mécanisme de consensus entre plusieurs candidats d'action en lieu et place du simple basculement entre expert et agent, et enfin l'injection d'un bruit coloré autorégressif dans les actions du robot pour garantir une exploration cohérente dans le temps. Les expériences réelles ont été conduites sur une tâche de ramassage avec une cuillère, un robot apprenant à exécuter ce geste correctement à partir de zéro en seulement 30 minutes d'interaction avec un expert humain.
L'enjeu central que CubeDAgger cherche à résoudre est la stabilité dynamique, un problème négligé par la majorité des méthodes actuelles. Les algorithmes d'apprentissage par imitation interactive existants fonctionnent bien pour des tâches statiques, où l'expert peut intervenir ponctuellement sans perturber le comportement du robot. Mais dès que la tâche implique du mouvement continu, ramasser un objet, stabiliser une trajectoire, un basculement brutal entre le mode expert et le mode autonome provoque des à-coups mécaniques qui compromettent la sécurité et la fiabilité. CubeDAgger réduit ces discontinuités, ce qui le rend pertinent pour des applications industrielles ou médicales où la précision du geste est critique.
L'apprentissage par imitation interactive, dont DAgger est le pionnier depuis 2011, reste une approche de référence pour entraîner des politiques robotiques robustes sans nécessiter des millions d'exemples. Le défi a toujours été de minimiser la charge imposée à l'expert humain tout en conservant la qualité de l'apprentissage. Les variantes récentes comme EnsembleDAgger avaient progressé sur ce point, mais butaient sur les tâches dynamiques. CubeDAgger s'inscrit dans une tendance plus large visant à rendre la robotique apprenante opérationnelle en dehors des environnements contrôlés de laboratoire, avec des horizons d'application dans la logistique, la chirurgie assistée, ou encore les robots d'assistance domestique.
Vu une erreur factuelle dans cet article ? Signalez-la. Toutes les corrections valides sont publiées sur /corrections.



