Des blocs de construction assemblés par robots pour une construction plus efficace et durable
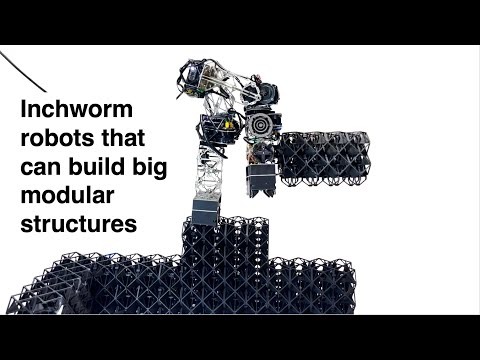
Des chercheurs du MIT ont développé un système de construction basé sur des blocs modulaires tridimensionnels, appelés "voxels", assemblés par des robots sur site. L'étude, publiée dans la revue Automation in Construction, a été menée par Miana Smith, doctorante au Center for Bits and Atoms (CBA) du MIT, en collaboration avec Paul Richard de l'École Polytechnique Fédérale de Lausanne, Alfonso Parra Rubio et Neil Gershenfeld, professeur au MIT et directeur du CBA. L'équipe a d'abord évalué huit designs de voxels existants, puis conçu trois nouveaux modèles basés sur une géométrie en treillis octet, capable de s'auto-aligner mécaniquement pour former des structures rigides sans nécessiter de nombreux connecteurs. Pour automatiser l'assemblage, les chercheurs ont développé les MILAbots, des robots qui se déplacent comme des chenilles sur la structure en cours de construction, en ancrant et étendant leur corps, et qui placent les voxels en place à l'aide de pinces avant de les verrouiller par emboîtement.
Les résultats préliminaires sont saisissants sur le plan environnemental : ce système pourrait réduire le carbone incorporé, c'est-à-dire l'ensemble des émissions liées au cycle de vie des matériaux, de jusqu'à 82 % par rapport aux techniques courantes comme l'impression 3D en béton, le béton préfabriqué modulaire ou la charpente métallique. Le système serait également compétitif en termes de coût et de délais de construction. Le choix des matériaux utilisés pour fabriquer les voxels joue cependant un rôle déterminant dans leur bilan carbone et leur prix. Si ces chiffres se confirment à plus grande échelle, ce type d'approche pourrait transformer radicalement la manière dont on construit des bâtiments, un secteur qui représente aujourd'hui environ 40 % des émissions mondiales de CO2.
Le CBA développe les voxels depuis plusieurs années, jusqu'ici appliqués à des domaines à haute performance comme l'aéronautique et le spatial, en partenariat avec la NASA, Airbus et Boeing, notamment pour des ailes d'avion, des pales d'éoliennes et des structures spatiales. L'idée centrale est d'importer dans la construction la rigueur d'ingénierie de l'industrie aéronautique. "Pourquoi ne pas construire des bâtiments aussi efficacement qu'on construit des avions ?" résume Neil Gershenfeld. Des questions essentielles restent encore à résoudre avant un déploiement à grande échelle : la robustesse à long terme, la résistance au feu, et la montée en puissance du système de robotique. Mais selon les chercheurs, ces premiers résultats valident la faisabilité de la fabrication numérique appliquée au bâtiment, un champ qui pourrait devenir central dans la course mondiale à la décarbonation de la construction.
L'implication de l'EPFL de Lausanne et les objectifs de décarbonation du bâtiment (40 % des émissions mondiales) s'inscrivent dans les priorités du Pacte Vert européen, bien que le système reste au stade de la recherche préliminaire.
Vu une erreur factuelle dans cet article ? Signalez-la. Toutes les corrections valides sont publiées sur /corrections.